
Security robots of S5.2 series are created for autonomous patrolling of protected areas for the purpose of video surveillance.
Video surveillance is carried out both in motion and during the stops in positions that are optimal for monitoring critical parts of the territory of the guarded facility.
S5.2 series series is represented by several models of robots. They are designed to solve various security tasks and are equipped with various video surveillance systems.
S5.2 Picard is the top model in the series. The robot is equipped fitted with an intelligent video surveillance system, able to recognize and track the people by PTZ and panoramic cameras.
Robotic patrolling system
- Automatic movement on the patrol route
- Obstacle avoidance and return to route
- Patrolling in low light conditions
- Invisible illumination of travel path
- Stop in case of deviation from the route
- Automatic battery charging when low
Intelligent video surveillance and audible warning
- 360-degree panoramic video surveillance
- Two models of PTZ camera
- Human and front face detector
- Human tracking with a PTZ camera
- ONVIF support
- Audible warning and intercom with an operator call button
- Human detection if an external server is used
Collaborative Patrolling
- Evenly distribution of robots along the patrol route
- Sequentially surveillance of common sectors from different positions
- Route reassignment if robots drop out
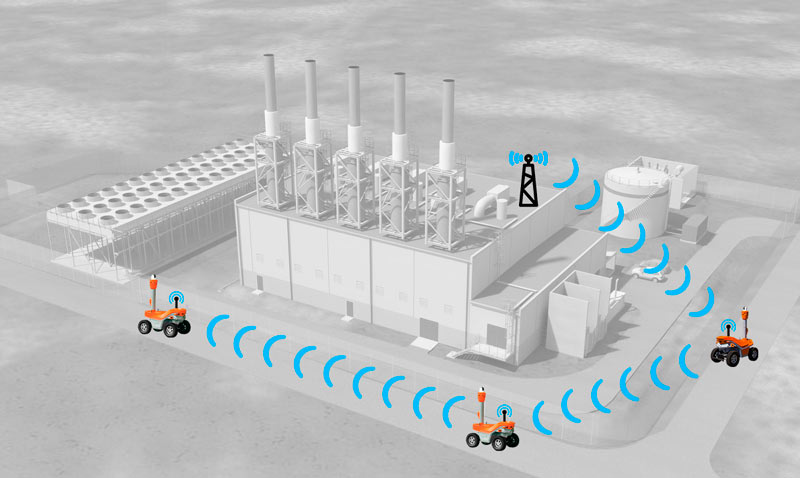
- Selection of relaying positions for WiFi MESH support
Communications
- Instant event notification via Security Robot Messenger
- ONVIF Video transmission via WiFi or 4G
- Video relaying in radio-shadow conditions via WiFi MESH
- Round-the-clock monitoring of robot operability via 4G
Robotic patrolling

The autonomous navigation system of a security robot provides high-precision travel along a route specified during the learning process. The robot uses visual navigation and GPS, so the best route following accuracy is achieved with the possibility of obtaining corrections from both systems. For full-fledged work of a visual navigation system, sufficient illumination is necessary; in case of its insufficiency, it is necessary to use open-air patrol routes for reliable operation of the satellite navigation system.
While patrolling, security robot can avoid obstacles and get back on its route. During travel in a nighttime, in low light conditions robot activates IR illumination, invisible to a human eye. In case of significant deviation from the route – for example, in long detours –robot has an inherent emergency shutdown system, triggered when the deviation exceeds 5 meters. In this case manual control mode is used to return the robot to its route.
Robot shipped with an auto charging docking station for timely recharging of the robot batteries, which ensures continuous and autonomous operation.
Transmission of video and alarm events
Transfer of video and service information from the robot is carried out through 4G or Wi-Fi networks. For continuous video surveillance, when working via CMS, it is reasonable to use Wi-Fi. When using robots equipped with an autonomous intelligent video surveillance system and human recognition, it is convenient to use the capabilities of 4G networks. In the latter case, the traffic generated by the robot is quite small, and the installation does not require additional efforts to create a Wi-Fi network with reliable coverage. In some cases, combined use of both data transfer methods is convenient. To reduce traffic, you can use Wi-Fi in dconditions of direct visibility of the access point. If the robot is located in a remote area of the patrolled territory or in the zone of uncertain coverage of a Wi-Fi network, the robot’s routers automatically switch to 4G channels of cellular operators.
Robots operation on the patrol route is accompanied by alerts, via the Security Robot Messenger instant messaging service. The service transmits photos, video fragments of alarm events detected by the video analytics system and informs about robot state. Messages are displayed on smartphone of a guard, operator or owner of the guarded facility.

Collaborative Patrolling
Security robots are designed for patrolling as parts of a group. Using a group of security robots enables to achieve the highest reliability in intelligent video surveillance over most spacious guarded areas.
To manage robots interaction, AI-featured collaborative patrolling mode has been developed. The AI snaps into action when solving previously unprogrammed tasks, interaction of robots as intelligent agents enables to reach an optimal solution.
Collaborative patrol mode allows to: synchronize movement for evenly distribution throughout the site; to perform sequential video surveillance of common areas areas from different observation points; to redistribute patrolling routes in case of stops for recharging, and to choose the best position for retransmission in the MESH WIFI networks.
Automatic operation indicating lights
Video surveillance mast of security robots is equipped with orange alarm LEDs for automatic movement indication and color LEDs for indication of operation modes. Theirsufficient brightness and high elevation helps to determine company employees robot’s operating mode at a considerable distance.
Audible warning and operator call button
Robots come with an audible warning system and an IP intercom.
Sound informer allows to repeatedly play the predefined phrases. Their initiation may occur automatically, when a person appear in the field of view of cameras or in manual mode by the command of the operator If a person who stays close to robot would like to call an operator, robot is equipped with a call button and intercom.

3 Models of Security Patrol Robots
All models of security robots have the same collaborative autonomous patrolling capabilities. Models differerence in video surveillance systems and their functionality.
Embedded video analytics or interaction with the CMS server
Robots without an IP index in a model name are equipped with a built-in analytics system and transfer photo, video files in the event of a real threat, finding people in the field of view of cameras. In fact, it is an autonomous security system consisting of a group of robots and transmitting alarm messages to the security guard, his manager, owner, smartphone or desktop computer without special software.
Robots with an IP index in a model name are designed to work as part of video surveillance systems with fixed video analysis servers. In essence, this is a team of self-moving cameras, all of which are given to CMS analytics or its operator.
Panoramic video surveillance with PTZ camera or without it
All models of robots provide panoramic surveillance through six high-resolution cameras arranged in a circle. These cameras allows to continuously monitor the area in the vicinity of the robot. On robots with 5.2 index in model name in addition to the panoramic cameras, a PTZ camera is installed. It gives the opportunity to zoom in to fragments of the environment or to scan the entire area during continuous rotation.
For the detection of faces and people in the field of view of cameras, supercomputers are installed in robots. One for processing all panoramic cameras, the second for PTZ only.
Intelligent Video Surveillance Robots
All-round surveillance in autonomous patrolling mode
Robot performs onboard processing of video from 6 panoramic cameras which aim is a human detection. Images from these cameras are alternately transmitted to the alarm channel, for subsequent wireless transmission via 4G or WiFi into the ONVIF CMS.
In the case when a person appears in the field of view of any camera, the channel search stops and only the video where the person was detected is transmitted. On a video stream this person will be marked with a red frame. At the same time, Security Robot Messenger sends a photo of the detected person and a link to download a 10-second video clip of the moment when person was detected on the smartphone of a guard or operator.
Despite that human was detected in the video of one of the cameras, the intelligent video surveillance system continues to analyze images from other cameras. If a person is detected on a video from them, the image is also transmitted to the “alarm channel”. The relevant message is sent to the Security Robot Messenger. When a person disappears from the camera’s view, after 3 seconds this video stream is deleted from the “alarm channel”.
Continuous all-round visibility, detection of people at medium distances makes S5.2 Prompt robot ideal for patrolling twisted routes in confined spaces in medium-sized areas. The robot is equipped with a highly efficient Wi-Fi MESH antenna and this allows it to be used as a repeater for transmitting data from other robots that are outside the line of sight of a Wi-Fi base station.
S5.2 Prompt is a perfect solution for night mobile video surveillance.
PTZ video surveillance from automatically changed positions
Apart from video analysis of images from panoramic cameras, this robot model analyzes the PTZ camera image. PTZ camera rotates and scans the surrounding area until a person is detected. The image from the PTZ camera will always be transmitted over the wireless communication channel to the ONVIF CMS.
In case if a person is detected by the embedded intelligent video surveillance system, camera stops the rotation and carries out its tracking. Analyzing the image, a face search in a front position is performed. Camera uses zoom control to get a photo of a person with the necessary resolution. In the ONVIF CMS video stream, the face of the detected person is highlighted with a blue frame, and the figure of the person is red. A photo of a person’s face and body is sent to the Security Robot Messenger along with a link to a video fragment.
An intelligent video surveillance system keeps tracking a person to a predetermined interval of time, after which an all-round scan continues. Detection and recognition of objects at a long distance by automatically controlled PTZ camera, continuous analysis of an all-round panorama makes 5.2 robot indispensable for robotic patrolling large areas. Typical use of the robot involves stopping it in a position that is optimal for observing a large portion of the protected area, and ensure video surveillance of it by rotating the PTZ camera.
Changing the positions of observation by the robot is reasonable after several tens turns of the PTZ camera, i.e. after 10 – 15 minutes.
SMP Robotics company has special pricing for distributors and retailers on all of our products. Wholesale pricing is available on low and high volume orders including custom production runs.
Technical characteristics of the security robots of S5.2 Series
| Name | PROMPT | PICARD | ARGUS |
|---|---|---|---|
| Label | S5.2 IS | S5.2 PTZ IS | S5.2 PTZ IR IS |
| 720P panoramic cameras | AHD | AHD | AHD |
| Sensitivity of panoramic cameras | 0.005 lx | 0.005 lx | 0.005 lx |
| 1/2.8″ PTZ camera, optical zoom/resolution | none | x20 720P | zoom: x30, digital: x12 |
| Sensitivity of PTZ camera | none | 0.1 lx | 0.1 lx |
| Cameras for object detection | panoramic | panoramic and PTZ | panoramic and PTZ |
| Long-distance detection of pedestrians, daytime, up to | 100 ft (30 m) | 300 ft (100 m) | 2500m, human 500m |
| Embedded computer for video analysis | T9 | 2pcs T9 | 2pcs T9 |
| Records | constantly or detection pedestrian | constantly or detection pedestrian | constantly or detection pedestrian |
| Bitrate and storage size per channel | 2048Kb/s or 4096 Kb/s, 0.9GB or 1.8 GB | 2048Kb/s or 4096 Kb/s, 0.9GB or 1.8 GB | 2048Kb/s or 4096 Kb/s, 0.9GB or 1.8 GB |
| SSD size, standart | 64GB | 64GB | 120GB |
| Wi-Fi MESH antennas | 8dBi | 2dBi | 2dBi |
| Estimated operating time | 12 hours | 10 hours | 10 hours |
| Charging time | 6 hours | 6 hours | 6 hours |
Additional equipment and infrastructure
For autonomous operation of robots in a guarded area, it is necessary to place additional stationary equipment: a base station for a satellite navigation system corrections; Abox communication unit for organizing wireless connections between robots, base station and Wi-Fi network in case of its deployment.
In order to automatically charge the batteries of the robots, automatic charging stations should be located on the territory of the protected object. Typically, one station is required for every two patrolling robots. Automatic charging station, does not require sheds or shelters and connected to a 220V network.
In the case of non-round-the-clock use of robots, it is necessary to provide a parking zone with the possibility of a longitudinal arrangement of the robot, for their subsequent automatic patroling.
24/7 virtual monitoring of robots operation
During operation, the data about the operation of the robots internal systems is transmitted to the center of virtual monitoring and technical support. In case of malfunctions, operator of the monitoring center informs the local technical staff about the need to interfere in the work of the robots. The virtual monitoring center has access only to the telemetry data of the robot and unable to receive video from surveillance cameras, so the volume of transmitted data does not generate significant traffic and convenient to be transmited by 4G networks.
The current status of the robot systems is displayed on the built-in display and control panel. It allows to diagnose any stop of the robot and, take action without connecting additional devices and computers.

