
Pour créer un système de patrouille fiable, des groupes de robots sont utilisés; pour organiser leur interaction les uns avec les autres, des solutions multi-agents sont utilisées. Il est recommandé d’estimer le nombre de robots de patrouille avec redondance.
Système d’un groupe de robots de sécurité
Les robots de sécurité utilisés pour assurer la sécurité des installations et de leurs locaux doivent effectuer ce travail en permanence. Parallèlement à cela, les robots doivent être chargés, réparés et maintenus ; des conflits sont également possibles si les robots sont incapables de se déplacer le long de leurs itinéraires de patrouille. Pour créer un système de patrouille fiable, des groupes de robots sont utilisés; pour organiser leur interaction les uns avec les autres, des solutions multi-agents sont utilisées. Dans un système composé d’un groupe de robots de sécurité, chaque robot agit comme un agent intelligent qui a son propre but et objectifs. Tous ont de l’équipement de communication sans fil pour partager des informations avec d’autres robots, et peuvent s’informer mutuellement sur leur état actuel et leurs intentions.
Combien de robots est-il nécessaire ?
Il est recommandé d’estimer le nombre de robots de patrouille avec redondance. Cela libérera des ressources telles que la distance d’endurance et le temps de repos, sans patrouille dans la zone assignée. La redistribution automatique des ressources gratuites entre les robots assure la fiabilité et la continuité du processus de patrouille. Par exemple, l’un des robots peut avoir lieu de son voisin si celui-ci a besoin de recharger et doit quitter son itinéraire. Cette interaction crée un système d’auto-organisation capable de réagir à des circonstances extérieures sans avoir besoin de programmer chaque réponse.

Technologie Swarm
pour systèmes de sécurité adaptatifs
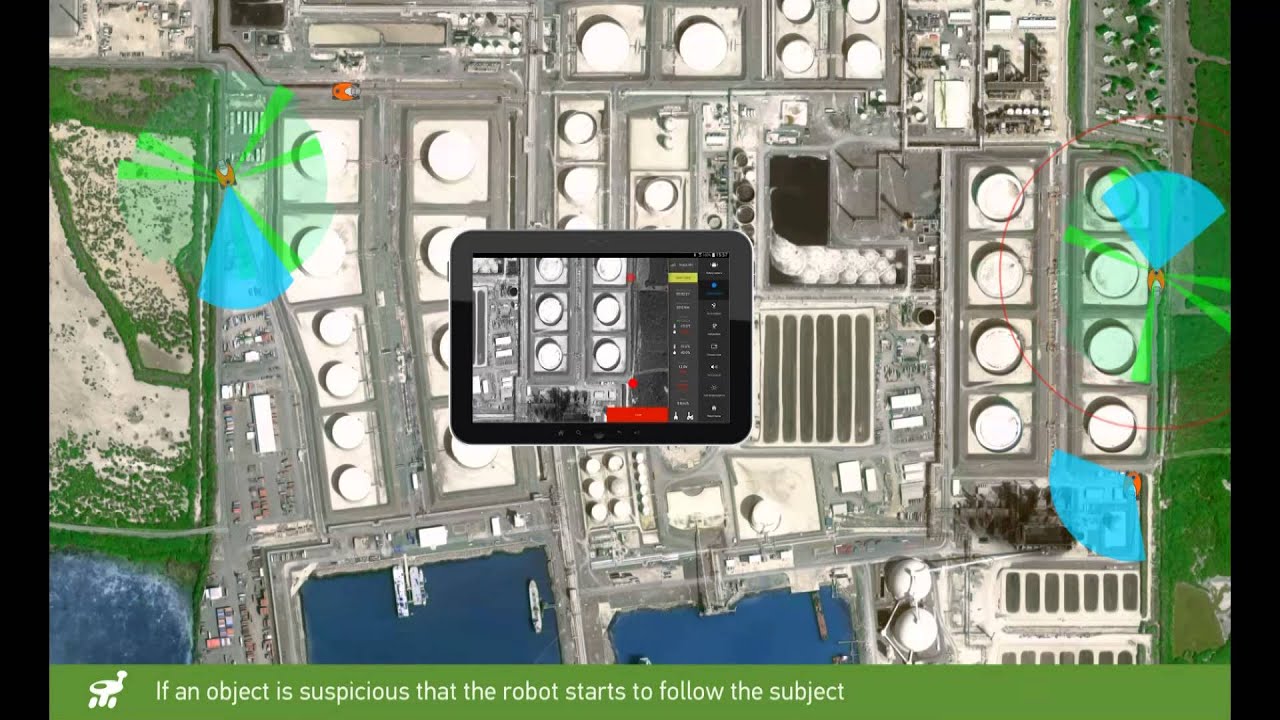
L’un des principaux objectifs d’un groupe de robots patrouillant dans les locaux est de s’assurer que la zone est également couverte par la surveillance, et d’empêcher les situations où une partie de celui-ci n’est pas arpentée. Toutefois, si un robot ne se déplace pas sur une longue période de temps, cela révèle sa position, et il est plus facile pour un intrus d’infiltrer secrètement les lieux. C’est pourquoi il est conseillé d’arpenter la même zone à partir de différents points d’observation. Cet objectif peut être atteint en faisant bouger les robots de manière interdépendante. Deux robots situés l’un à côté de l’autre assurent la surveillance d’une zone des lieux et l’examinent à tour de rôle sous différents angles.
La continuité des patrouilles peut être perturbée par l’exclusion d’un ou plusieurs robots du processus de patrouille. Il y a des raisons prévisibles à cela, comme la nécessité de recharger, ou imprévisibles, comme un obstacle insurmontable apparaissant dans le chemin de mouvement d’un robot. Dans ce cas, la tâche des robots qui fonctionnent encore est réaffectée pour assurer la sécurité de la zone des lieux qui a été patrouillée par le robot inopérant.
Cet objectif est atteint grâce à l’interaction multi-agents entre les robots où chacun d’eux peut ajuster indépendamment sa tâche actuelle pour résoudre le plus de problème. Il faut noter que la résolution de ces problèmes nécessite une certaine redondance des ressources dans le système de robots mobiles. Si le nombre de robots ou la quantité de ressources pour les itinéraires de patrouille ne prend en charge que la tâche locale du robot (c’est-à-dire patrouiller une certaine zone), alors les priorités doivent être fixées pour les zones patrouillées dans des conditions où les ressources pour le système multi-agents robot de sécurité sont limitées.
À ce stade, une fonctionnalité qui permettra d’établir les priorités des zones de patrouille est en cours d’élaboration. L’objectif principal de ce travail est d’obtenir la possibilité de fixer la priorité pour une zone des lieux en analysant le big data reçu à la suite de l’opération du robot.

Réseau de maille intelligent
pour robots mobiles
Une des conditions du bon fonctionnement du système multi-agents robot de sécurité est l’existence de canaux de communication sans fil entre eux. De plus, pour que le système de vidéosurveillance fonctionne efficacement, les flux vidéo et les messages d’avertissement avec des fragments de photos ou de vidéos doivent être envoyés au bureau de régulation de la sécurité de l’entreprise. Le déploiement de réseaux MESH entre les robots aide à accomplir ces tâches.

Utilisation de robots mobiles pour établir des réseaux de maille sans fil mobiles
Tous les robots peuvent échanger des données via la 4G/LTE ou 5G et le Wi-Fi. Pour réduire la quantité de trafic 4G/LTE ou 5G, les routeurs Wi-Fi peuvent fonctionner en mode MESH et Ad-Hoc. Ces modes soutiennent le relais des données d’un robot à travers d’autres robots à une station de base. En cas de développement à haute densité ou d’une grande quantité de végétation, il est conseillé d’utiliser d’autres robots distincts qui servent de répéteurs de signaux radio. Dans le cas où il est préférable d’utiliser la 4G/LTE ou 5G seulement, il y a une place à l’intérieur du robot pour installer un routeur supplémentaire fourni par l’opérateur cellulaire local.
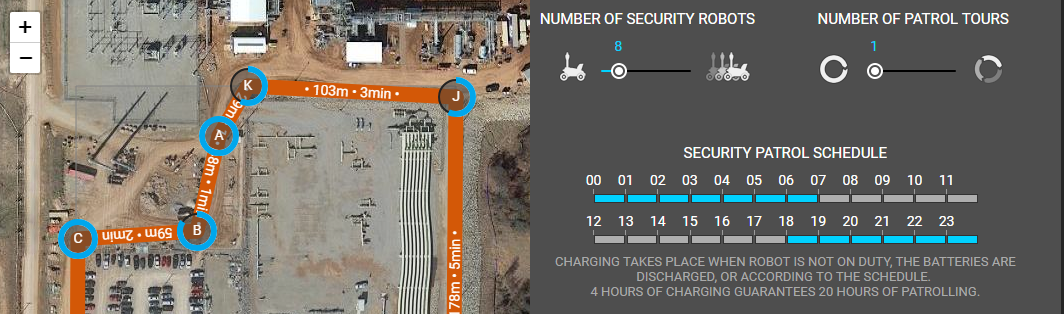
Le nombre de robots nécessaires pour les patrouilles d’intelligence d’essaims
Le nombre de robots nécessaires et suffisants pour assurer une sécurité fiable est déterminé par les caractéristiques de l’installation protégée. Une calculatrice en ligne pour les patrouilles et le temps de surveillance vous aidera à évaluer le nombre de robots de sécurité nécessaires. Ce service simple est basé sur Google Maps et permet de tracer les itinéraires de patrouille et les positions de surveillance pour les robots de sécurité de l’installation. Le programme calcule combien de temps est nécessaire pour les robots à se déplacer, et combien d’entre eux sont laissés pour la surveillance dans des positions stationnaires. Selon le résultat, vous pouvez augmenter ou diminuer le nombre de robots virtuellement déployés.
Système de robot de sécurité auto-organisé pour les grandes installations
«Swarm intelligence», une partie intrinsèque de l’équipe de sécurité robotique, permet de protéger de manière fiable les installations à grande échelle avec une topographie compliquée ou un développement à haute densité. Le comportement « swarm » prend en charge le travail de jusqu’à 100 robots en même temps. Ce nombre assure une sécurité fiable des très grandes installations.
Notre société est intéressée par l’installation de robots pour relever les défis de surveillance dans les installations à grande échelle, où les conditions sont compliquées. Nos spécialistes effectueront le travail d’installation et fourniront un soutien pendant la période d’essai. Si nécessaire, nous développerons des modules logiciels supplémentaires qui prennent en compte les caractéristiques d’une installation particulière.
Estimer l’efficacité des robots de sécurité aujourd’hui. Découvrez notre nouveau service de déploiement de robots virtuels. Créez un itinéraire de patrouille pour votre installation à l’aide de Google Maps. Nous estimerons le nombre de robots nécessaires à votre sécurité.
Nous sommes ouverts à la coopération avec les entreprises qui assurent la sécurité des installations à grande échelle. Nous croyons que nos robots peuvent maintenir un haut niveau de sécurité tout en réduisant les coûts.
Les aspects de la technologie des essaims pour les patrouilles de sécurité
Affectations de robots adaptatifs
Pour s’assurer que les zones protégées sont arpentées uniformément et consécutivement à partir de différents points d’observation.
Réaffectation des itinéraires de patrouille parmi les robots
Pour une surveillance non-interrompue de l’ensemble des lieux lorsqu’un robot part pour être rechargé, ou pour la maintenance.
Transmission de flux vidéo
Lorsque des obstacles surgissent à l’aide d’un robot répéteur supplémentaire qui est placé automatiquement entre le robot de sécurité et la station de base.
